EV3にArduinoを接続して、使用するセンサーの数を増やそうと考えています。
まずは、Arduinoを使ってみようと、コンパクトなライントレースロボットを作ってみたいと思います。
機体は3Dプリンタで制作し、他の材料はできるだけ入手が容易なものし、性能よりも手軽に楽しむためのコンパクトなライントレースロボットを目指します。
- タミヤダブルギアボックス
- タミヤボールキャスター
- タミヤトラックタイヤセット(36mm)
- M3ボルト・ナット
- モーター電源用ワイヤ
- 半田ごて
- 半田
- ニッパー
- プラスドライバー
部品等の購入先リンクは記事の一番下に記載してあります。
ギアボックス組立
本当は、透明なケースのものが欲しかったのですが、在庫がないため、仕方なく通常のはグレーのものにしました。ちなみに小さい頃から中身の見えるスケルトンが大好きで、世の中の動くもの、全部スケルトンで中のしくみが見えるようにしてほしいくらいです。
タミヤのダブルギアボックスは、ギア比を「344.2:1」、「114.7:1」、「38.2:1」、「12.7:1」の4つの中から選択して組み立てるようになっています。左右で別のギア比を選択することも可能です。軸はタミヤの工作セットによくある六角のものとなります。今回はスピードは求めていませんので、「38.2:1」で制作します。
組み立ては説明書を見れば難なく作れます。ニッパーとプラスドライバーが必要です。グリスはどのくらい付ければよいのか悩みましたが、ギアの歯の部分、回転する部分に綿棒を使って薄く塗りました。
モーターにワイヤは付いていませんので手持ちのものを使用し、ついでに0.1μFのラミックコンデンサも半田付けしておきました。

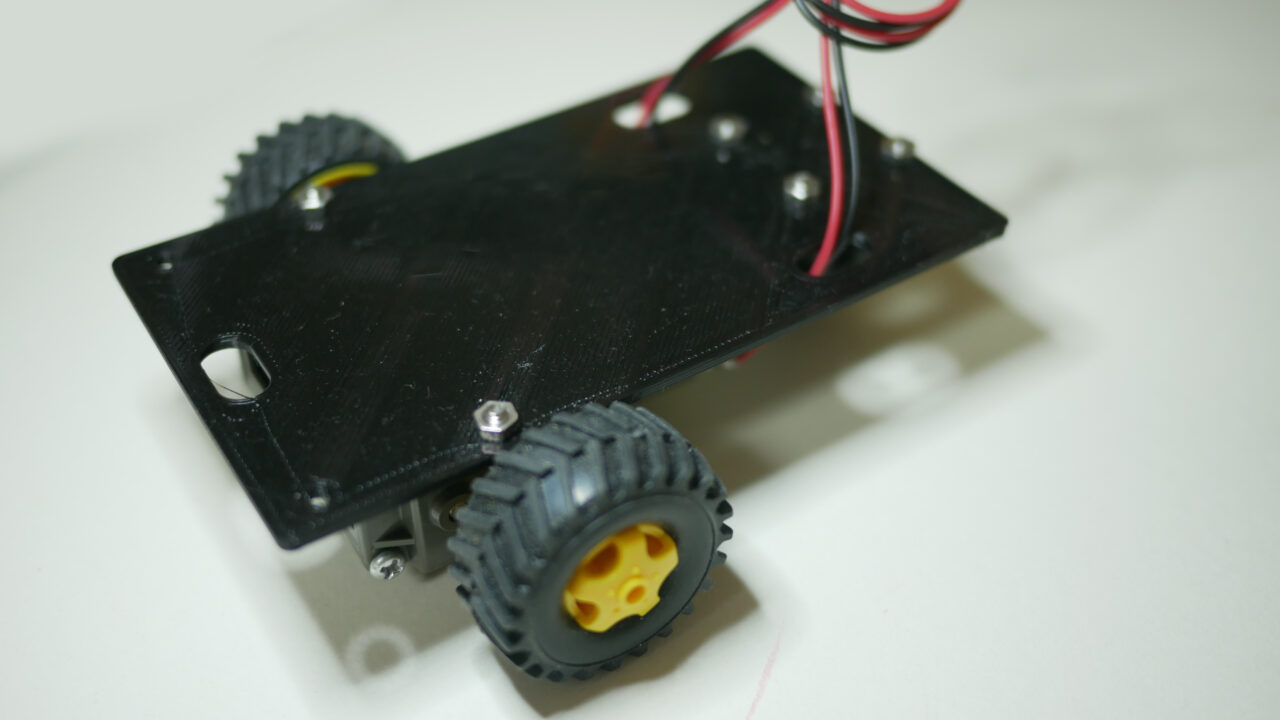
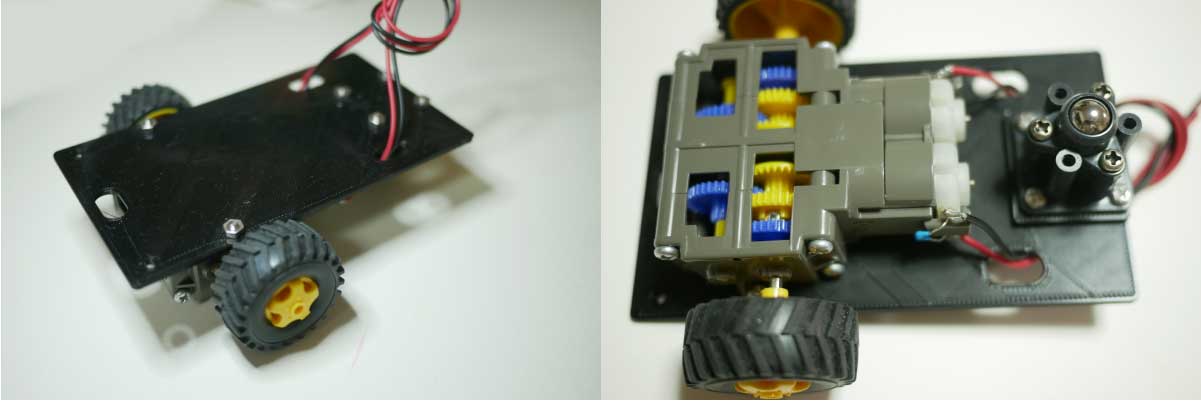
機体(3Dプリンタで制作)
メインの機体は3Dプリンタで制作しました。
ギアボックス、ボールキャスター取付用のボルト穴、ロボット前側にラインセンサー取付用のボルト穴、モーターとセンサーの配線用の穴をあけておきます。マイコンやモータードライバを固定する位置をまだ決めていないため、それらを固定するためのボルト穴は、まだありません。
ボールキャスターの高さは、25mmで組み立て、高さ調整のために固定する部分を2.5mmほど高くしています。
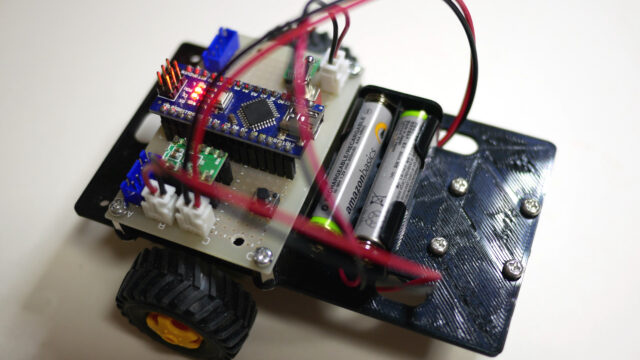
次回はモータードライバとマイコン関連の回路を作って行く予定です。